Project
1.Tempratcher sensor (DTH11)
project Description: This project can check Tempratcher and Humidity.
What is Humidity
Circuit

Code
#include <SimpleDHT.h>
SimpleDHT11 dth;
// for DHT11,
// VCC: 5V or 3V
// GND: GND
// DATA: 2
int pinDHT11 = 2;
void setup() {
Serial.begin(9600);
Serial.println("Temperature and Humidity");
}
void loop() {
byte temperature = 0;
byte humidity = 0;
dth.read(pinDHT11, &temperature, &humidity, NULL);
Serial.print("Temperature = ");
Serial.println(temperature);
Serial.print("Humidity = ");
Serial.println(humidity);
delay(2000);
}
2. ultrasonic sensor distance show in the serial monitor and Buzzer.
project Description: In this project, we see distance management in the serial monitor and buzzer.
Circuit 1

Code 1
int trig = 8, echo = 7;
long duration , cm , inche;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(trig, HIGH);
delay(20);
digitalWrite(trig, LOW);
duration = pulseIn(echo , HIGH);
cm = duration * 0.034/2; // cm
inche = duration * 0.0133/2; // inche
Serial.print("CM = ");
Serial.println(cm);
Serial.print("Inche = ");
Serial.println(inche);
delay(1000);
}
Circuit 2

Code 2
int trig = 8, echo = 7;
int buzzer = 12;
long duration , cm , inche;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(trig, OUTPUT);
pinMode(echo, INPUT);
pinMode(buzzer, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(trig, HIGH);
delay(20);
digitalWrite(trig, LOW);
duration = pulseIn(echo , HIGH);
cm = duration * 0.034/2; // cm
inche = duration * 0.0133/2; // inche
if (cm <= 10){
digitalWrite(buzzer, HIGH);
}
else{
digitalWrite(buzzer, LOW);
}
Serial.print("CM = ");
Serial.println(cm);
Serial.print("Inche = ");
Serial.println(inche);
delay(1000);
}
3. GAS Detector Project.
project Description: In this project, you can detective gas.
Circuit 1

Code 1
long gas;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
gas = analogRead(A5);
Serial.print("Value= ");
Serial.println(gas);
delay(1000);
}
Circuit 2

Code 2
long gas;
int buzzer = 7;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(buzzer,OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
gas = analogRead(A5);
Serial.print("Value= ");
Serial.println(gas);
if(gas>600){
digitalWrite(buzzer , HIGH);
}
else{
digitalWrite(buzzer , LOW);
}
delay(1000);
}
4. Bluetooth Module Project.
Mobile APK Download

Circuit 1

Code 1
char value = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
if (Serial.available()>0){
value = Serial.read();
Serial.println(value);
}
delay(50);
}
Circuit 2

Code 2
char value = 0;
#define led1 13
void setup()
{
Serial.begin(9600);
pinMode(led1,OUTPUT);
}
void loop()
{
if (Serial.available()>0){
value = Serial.read();
if(value == '1'){
digitalWrite(led1,HIGH);
}
else if(value == '0'){
digitalWrite(led1,LOW);
}
Serial.println(value);
}
delay(50);
}
Circuit 3

Code 3
char value = 0;
#define led1 13
#define led2 12
#define led3 10
#define led4 11
void setup()
{
Serial.begin(9600);
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
pinMode(led3,OUTPUT);
pinMode(led4,OUTPUT);
}
void loop()
{
if (Serial.available()>0){
value = Serial.read();
if(value == '1'){
digitalWrite(led1,HIGH);
}
else if(value == '0'){
digitalWrite(led1,LOW);
}
else if (value == '2'){
digitalWrite(led2,HIGH);
}
else if(value == '3'){
digitalWrite(led2,LOW);
}
else if (value == '4'){
digitalWrite(led3,HIGH);
}
else if(value == '5'){
digitalWrite(led3,LOW);
}
else if (value == '6'){
digitalWrite(led4,HIGH);
}
else if(value == '7'){
digitalWrite(led4,LOW);
}
Serial.println(value);
}
delay(50);
}
5. Bluetooth Module With Relay Board Project.
Circuit 1

Code 1
char value = 0;
#define relay1 13
#define relay2 12
#define relay3 10
#define relay4 11
void setup()
{
Serial.begin(9600);
pinMode(relay1,OUTPUT);
pinMode(relay2,OUTPUT);
pinMode(relay3,OUTPUT);
pinMode(relay4,OUTPUT);
}
void loop()
{
if (Serial.available()>0){
value = Serial.read();
if(value == '1'){
digitalWrite(relay1,HIGH);
}
else if(value == '0'){
digitalWrite(relay1,LOW);
}
else if (value == '2'){
digitalWrite(relay2,HIGH);
}
else if(value == '3'){
digitalWrite(relay2,LOW);
}
else if (value == '4'){
digitalWrite(relay3,HIGH);
}
else if(value == '5'){
digitalWrite(relay3,LOW);
}
else if (value == '6'){
digitalWrite(relay4,HIGH);
}
else if(value == '7'){
digitalWrite(relay4,LOW);
}
Serial.println(value);
}
delay(50);
}
6. Receiving data from the sensor and showing in the mobile phone use of Bluetooth Module.
Circuit 1

Code 1
#include <SimpleDHT.h>
SimpleDHT11 dth;
// for DHT11,
// VCC: 5V or 3V
// GND: GND
// DATA: 2
int pinDHT11 = 2;
void setup() {
Serial.begin(9600);
Serial.println("Temperature and Humidity");
}
void loop() {
byte temperature = 0;
byte humidity = 0;
dth.read(pinDHT11, &temperature, &humidity, NULL);
Serial.print("Temperature = ");
Serial.println(temperature);
Serial.print("Humidity = ");
Serial.println(humidity);
delay(2000);
}
7. Arduino Manager Apps
Apk Download

Circuit 1

Code 1
char value = 0;
void setup(){
Serial.begin(9600);
}
void loop(){
if (Serial.available()>0){
value = Serial.read();
Serial.println(value);
}
delay(50);
}
8. Measure soil moisture using Arduino Project
Circuit 1
Code 1
int soil;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
soil = analogRead(A0);
Serial.println(soil);
delay(500);
}
9. PIR sensor using Arduino Project
Circuit 1

Code 1
int pir = 2;
int led = 13;
int value;
void setup() {
// put your setup code here, to run once:
pinMode(pir,INPUT);
pinMode(led,OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
value = digitalRead(pir);
digitalWrite(led,value);
}
10. Bluetooth Controlled Car
Circuit 1
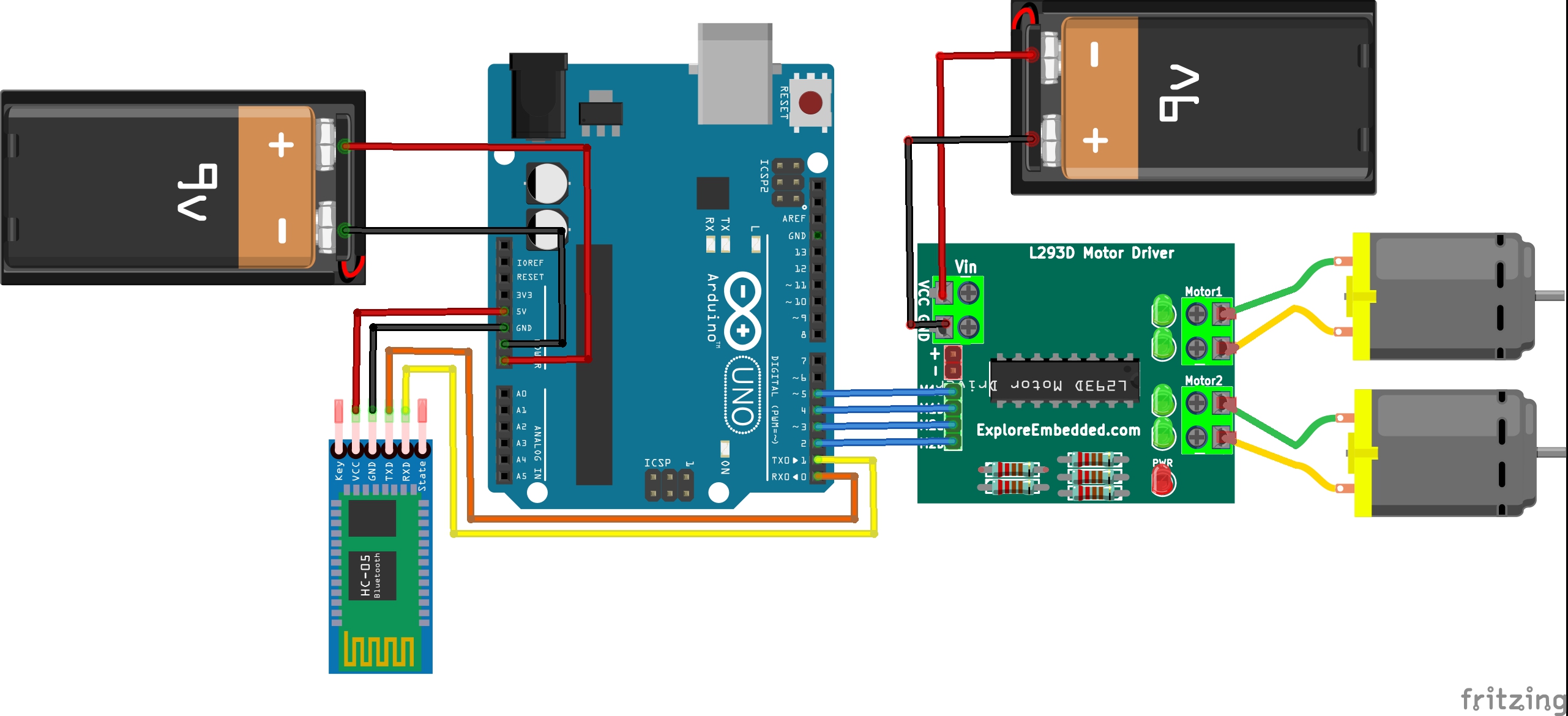
Code 1
char t;
#define m1 2
#define m2 3
#define m3 4
#define m4 5
void setup() {
Serial.begin(9600);
pinMode(m1,OUTPUT); //right motors forward
pinMode(m2,OUTPUT); //right motors reverse
pinMode(m3,OUTPUT); //left motors forward
pinMode(m4,OUTPUT); //left motors reverse
}
void loop() {
if(Serial.available()){
t = Serial.read();
}
if(t == 'W'){ //move forward(all motors rotate in forward direction)
digitalWrite(m1,HIGH);
digitalWrite(m2,LOW);
digitalWrite(m3,HIGH);
digitalWrite(m4,LOW);
}
else if(t == 'S'){ //move reverse (all motors rotate in reverse direction)
digitalWrite(m1,LOW);
digitalWrite(m2,HIGH);
digitalWrite(m3,LOW);
digitalWrite(m4,HIGH);
}
else if(t == 'A'){ //turn right (left side motors rotate in forward direction, right side motors rotate in reverse direction for 100ms & stop)
digitalWrite(m1,HIGH);
digitalWrite(m2,LOW);
digitalWrite(m3,LOW);
digitalWrite(m4,HIGH);
delay(100);
}
else if(t == 'D'){ //turn left (right side motors rotate in forward direction, left side motors rotate in reverse direction for 100ms & stop)
digitalWrite(m1,LOW);
digitalWrite(m2,HIGH);
digitalWrite(m3,HIGH);
digitalWrite(m4,LOW);
delay(100);
}
else if((t == 's')||(t == 'w')||(t == 'a')||(t == 'd')){ //STOP (all motors stop)
digitalWrite(m1,LOW);
digitalWrite(m2,LOW);
digitalWrite(m3,LOW);
digitalWrite(m4,LOW);
}
delay(100);
} 11. Voice Controlled Car
Circuit 1
Code 1
#define m1 2
#define m2 3
#define m3 4
#define m4 5
void setup()
{
pinMode(m1, OUTPUT);
pinMode(m2, OUTPUT);
pinMode(m3, OUTPUT);
pinMode(m4, OUTPUT);
Serial.begin(9600);
}
void loop()
{
if (Serial.available())
{
String voice = Serial.readString();
Serial.println(voice);
if(voice == "forward")
{
digitalWrite(m1, HIGH);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
digitalWrite(m4, LOW);
}
if(voice == "backward")
{
digitalWrite(m2, HIGH);
digitalWrite(m1, LOW);
digitalWrite(m4, HIGH);
digitalWrite(m3, LOW);
}
if(voice == "left")
{
digitalWrite(m1, LOW);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
digitalWrite(m4, LOW);
}
if(voice == "right")
{
digitalWrite(m1, HIGH);
digitalWrite(m2, LOW);
digitalWrite(m3, LOW);
digitalWrite(m4, LOW);
}
else if(voice == "stop")
{
digitalWrite(m1, LOW);
digitalWrite(m2, LOW);
digitalWrite(m3, LOW);
digitalWrite(m4, LOW);
}
}
}
Code 2 use Function and delay
#define m1 2
#define m2 3
#define m3 4
#define m4 5
void setup()
{
pinMode(m1, OUTPUT);
pinMode(m2, OUTPUT);
pinMode(m3, OUTPUT);
pinMode(m4, OUTPUT);
Serial.begin(9600);
}
void loop()
{
if (Serial.available())
{
String voice = Serial.readString();
Serial.println(voice);
if(voice == "forward")
{
forward();
delay(1000);
stope();
}
if(voice == "backward")
{
backward();
delay(1000);
stope();
}
if(voice == "left")
{
left();
delay(500);
stope();
}
if(voice == "right")
{
right();
delay(500);
stope();
}
else if(voice == "stop")
{
stope();
}
}
}
void forward(){
digitalWrite(m1, HIGH);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
digitalWrite(m4, LOW);
}
void backward(){
digitalWrite(m2, HIGH);
digitalWrite(m1, LOW);
digitalWrite(m4, HIGH);
digitalWrite(m3, LOW);
}
void left(){
digitalWrite(m1, LOW);
digitalWrite(m2, LOW);
digitalWrite(m3, HIGH);
digitalWrite(m4, LOW);
}
void right(){
digitalWrite(m1, HIGH);
digitalWrite(m2, LOW);
digitalWrite(m3, LOW);
digitalWrite(m4, LOW);
}
void stope(){
digitalWrite(m1, LOW);
digitalWrite(m2, LOW);
digitalWrite(m3, LOW);
digitalWrite(m4, LOW);
}
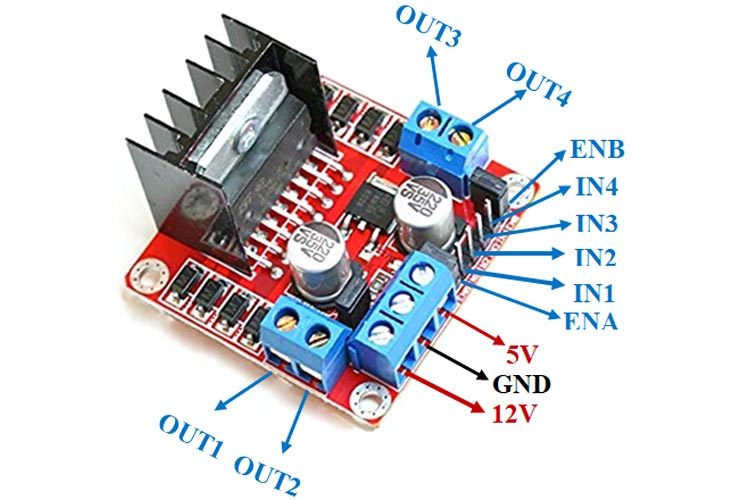
12. line following robot
Circuit 1

Code
#define enA 10//Enable1 L298 Pin enA
#define in1 9 //Motor1 L298 Pin in1
#define in2 8 //Motor1 L298 Pin in1
#define in3 7 //Motor2 L298 Pin in1
#define in4 6 //Motor2 L298 Pin in1
#define enB 5 //Enable2 L298 Pin enB
#define R_S A0 //ir sensor Right
#define L_S A1 //ir sensor Left
void setup(){ // put your setup code here, to run once
pinMode(R_S, INPUT); // declare if sensor as input
pinMode(L_S, INPUT); // declare ir sensor as input
pinMode(enA, OUTPUT); // declare as output for L298 Pin enA
pinMode(in1, OUTPUT); // declare as output for L298 Pin in1
pinMode(in2, OUTPUT); // declare as output for L298 Pin in2
pinMode(in3, OUTPUT); // declare as output for L298 Pin in3
pinMode(in4, OUTPUT); // declare as output for L298 Pin in4
pinMode(enB, OUTPUT); // declare as output for L298 Pin enB
analogWrite(enA, 150); // Write The Duty Cycle 0 to 255 Enable Pin A for Motor1 Speed
analogWrite(enB, 150); // Write The Duty Cycle 0 to 255 Enable Pin B for Motor2 Speed
delay(1000);
}
void loop(){
if((digitalRead(R_S) == 0)&&(digitalRead(L_S) == 0)){forword();} //if Right Sensor and Left Sensor are at White color then it will call forword function
if((digitalRead(R_S) == 1)&&(digitalRead(L_S) == 0)){turnRight();} //if Right Sensor is Black and Left Sensor is White then it will call turn Right function
if((digitalRead(R_S) == 0)&&(digitalRead(L_S) == 1)){turnLeft();} //if Right Sensor is White and Left Sensor is Black then it will call turn Left function
if((digitalRead(R_S) == 1)&&(digitalRead(L_S) == 1)){Stop();} //if Right Sensor and Left Sensor are at Black color then it will call Stop function
}
void forword(){ //forword
digitalWrite(in1, HIGH); //Right Motor forword Pin
digitalWrite(in2, LOW); //Right Motor backword Pin
digitalWrite(in3, LOW); //Left Motor backword Pin
digitalWrite(in4, HIGH); //Left Motor forword Pin
}
void turnRight(){ //turnRight
digitalWrite(in1, LOW); //Right Motor forword Pin
digitalWrite(in2, HIGH); //Right Motor backword Pin
digitalWrite(in3, LOW); //Left Motor backword Pin
digitalWrite(in4, HIGH); //Left Motor forword Pin
}
void turnLeft(){ //turnLeft
digitalWrite(in1, HIGH); //Right Motor forword Pin
digitalWrite(in2, LOW); //Right Motor backword Pin
digitalWrite(in3, HIGH); //Left Motor backword Pin
digitalWrite(in4, LOW); //Left Motor forword Pin
}
void Stop(){ //stop
digitalWrite(in1, LOW); //Right Motor forword Pin
digitalWrite(in2, LOW); //Right Motor backword Pin
digitalWrite(in3, LOW); //Left Motor backword Pin
digitalWrite(in4, LOW); //Left Motor forword Pin
}




No comments:
Post a Comment